原子力显微镜的成像模式及特点
当前位置:首页 >> 仪器仪表技术文章
原子力显微镜的成像模式及特点
探针和样品间的力一距离关系是本仪器测量的关键点。当选择不同的初始工作距离时,探针所处的初始状态也是不同的。由此可将原子力显微镜的操作模式分为三大类型:接触模式(Contact Mode)、非接触模式(Non-contact Mode)和轻敲模式(Tapping Mode)。图1给出了AFM不同操作模式在针尖和样品相互作用力曲线中的工作区间和力属性。
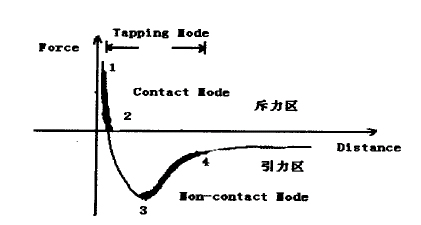
图1 原子力显徽镜的工作模式在力一距离曲线上的分布
1、接触模式(Contact Mode)
样品扫描时,针尖始终同样品“接触”。此模式通常产生稳定、高分辨图像。针尖一样品距离在小于零点几个纳米的斥力区域,对应图1中的1-2段。当样品沿着xy方向扫描时,由于表面的高低起伏使得针尖一样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,再反射到位置灵敏的光电检测器时,检测器不同象限会接收到同悬臂形变量成一定的比例关系的激光强度差值。反馈回路根据检测器的信号与预置值的差值,不断调整针尖一样品距离,并且保持针尖一样品作用力不变,就可以得到表面形貌像。这种测量模式称为恒力模式。当已知样品表面非常平滑时,可以让针尖一样品距离保持恒定,这时针尖一样品作用力大小直接反映了表面的高低,这种方法称恒高模式。由于生物分子的弹性模量较低,同基底间的吸附接触也很弱,针尖一样品间的压缩力和摩擦力容易使样品发生变形,从而降低图像质量。
2、非接触模(Non-contact Mode)
针尖在样品表面的上方振动,始终不与样品表面接触。针尖检测的是范德瓦耳斯吸引力和静电力等长程力,对样品没有破坏作用。针尖一样品距离在几到几十纳米的吸引力区域,对应图1中的3-4段,针尖一样品作用力比接触式小几个数量级,但其力梯度为正且随针尖一样品距离减小而增大。当以共振频率驱动的微悬臂接近样品表面时,由于受到递增的力梯度作用,使得微悬臂的有效的共振频率减小,因此在给定共振频率处,微悬臂的振幅将减小很多。振幅的变化量对应于力梯度量以得到样品的表面形貌像。但由于针尖一样品距离较大,因此分辨率比接触式的低。到目前为止,非接触模式通常不适合在液体中成像,在生物样品的研究中也不常见。
3、 轻敲模式(Tapping Mode)
轻敲模式是上述两种模式之间的扫描方式。扫描时,在共振频率附近以更大的振幅(>20nm)驱动微悬臂,使得针尖与样品间断地接触。当针尖没有接触到表面时,微悬臂以一定的大振幅振动,当针尖接近表面直至轻轻接触表面时,振幅将减小;而当针尖反向远离时,振幅又恢复到原值。反馈系统通过检测该振幅来不断调整针尖一样品距离进而控制微悬臂的振幅,使得作用在样品上的力保持恒定。由于针尖同样品接触,分辨率几乎与接触模式一样好;又因为接触非常短暂,剪切力引起的样品破坏几乎完全消失。轻敲模式适合于分析柔软、粘性和脆性的样品,并适合在液体中成像。
更多相关信息
分类点击排行
- 1500米防水温度记录仪MX2204 HOBO TidbiT MX Tempe 5000
- HOBO无线蓝牙水下温度记录仪MX2203 TidbiT MX
- MX2201新款带蓝牙水下温度记录仪Pendant MX Temp
- 防火报警智能热像Fotric816/Fotric826
- 工程师通用热像仪Fotric 222s/Fotric 222s-1/Fotric 222s-2
- HOBO MX100蓝牙温度记录仪防水等级IP67
- 可程式噪音计TES-1352S带记录可插SD卡
- 数据记录型照度光量子计TES-1339P
- 便携一体式温湿度大气压力计TES-1160/TES-1161
- 高精度水位计MX2001-04-s带无线数据传输